线性代数与变换
线性代数基础¶
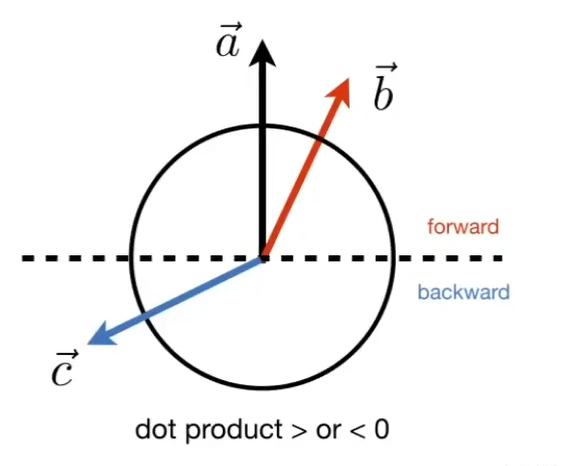
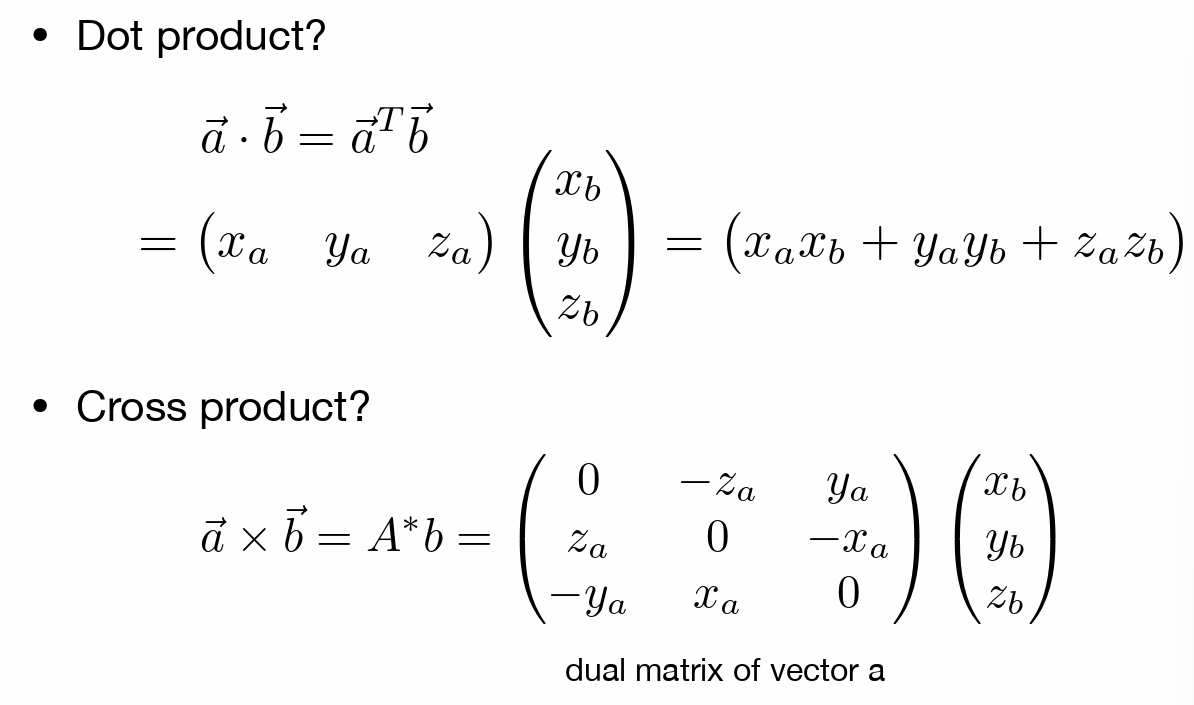
- 点乘主要用来求两个单位向量的夹角
- 可以用于判断两个方向的接近程度(夹角),判断前后
- 射线与球面求交:给定射线 \(P(t)=e+td\) 和一个隐式曲面 \(f(p)=0\),当射线上的点满足方程时,交点便产生了 \(f(p(t))=0\quad or \quad f(e+td) = 0\)
- 射线与三角形求交:通常直接用三点式三角面和射线联立,判断是否与该平面有交点,但具体是否在三角形内还要额外进行判断
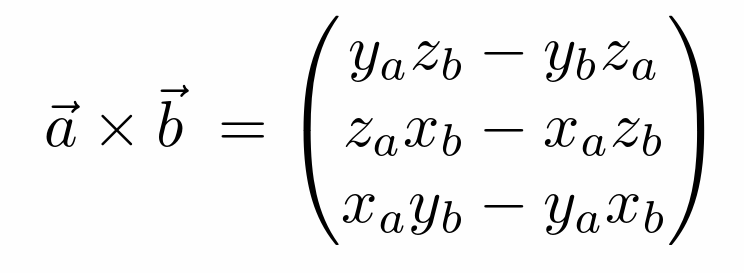
- 叉乘
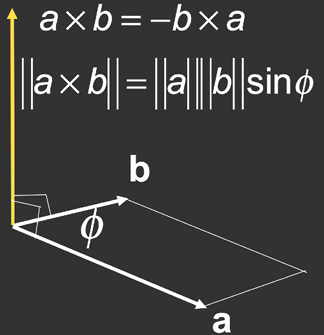
- 可以用于求出三维直角坐标系 (右手坐标系),指导两个方向就能推导出第三个方向 \(\overrightarrow{x}\times \overrightarrow{y}=\overrightarrow{z}\)
- 三角形面积:\(A = \frac{1}{2} \begin{vmatrix} x_b-x_a & x_c-x_a \\ y_b-y_a & y_c-y_a \end{vmatrix}\),abc 三点逆时针排列时 A 为正,反之为负。
- 判断左右、内外(p 在三角形三条边的同一边(左边))
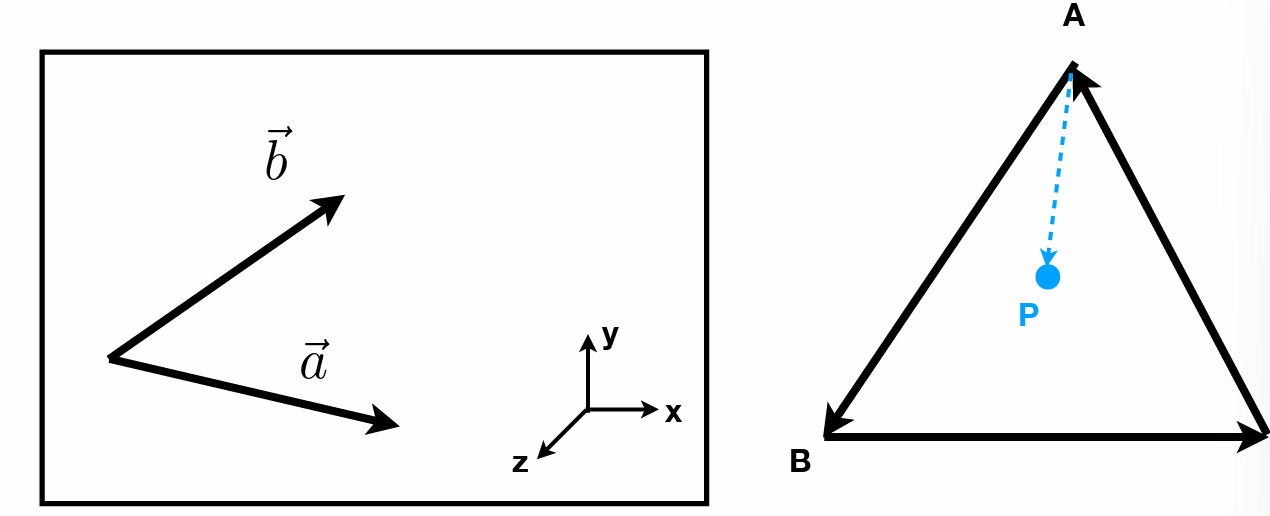
- 三角形内的点可以表示:\(P = \alpha a+\beta b+ \gamma c\quad where \quad \alpha+\beta+\gamma = 1 \quad \alpha, \beta, \gamma \lt 1\)
- 矩阵
- 乘法符合结合律、分配律,没有交换律
- 表示向量运算
变换¶
变换基础¶
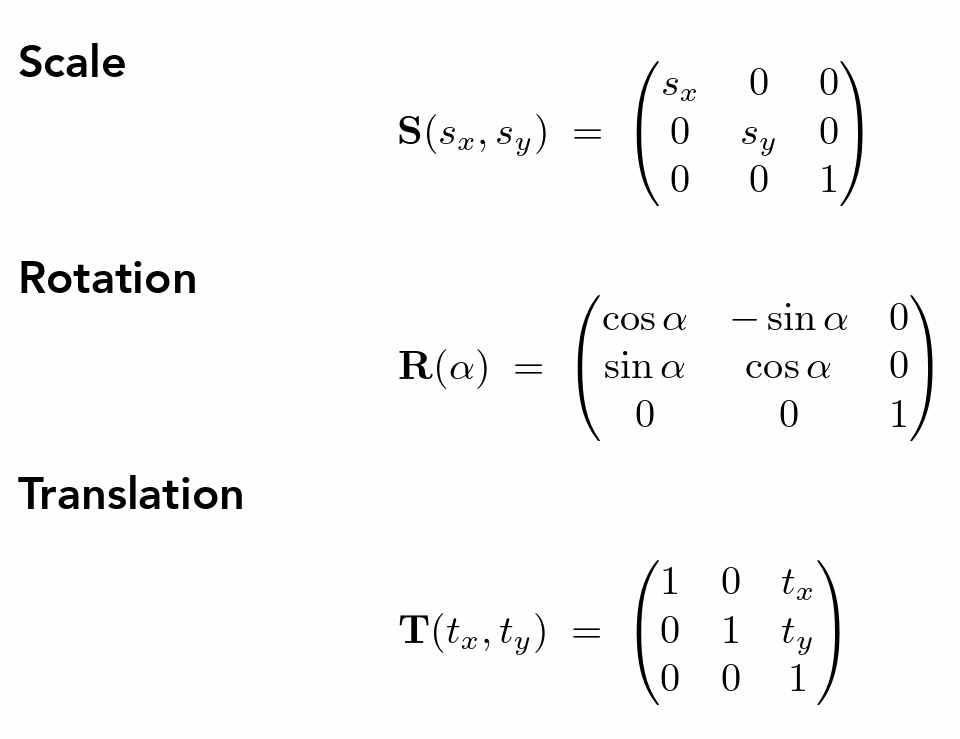
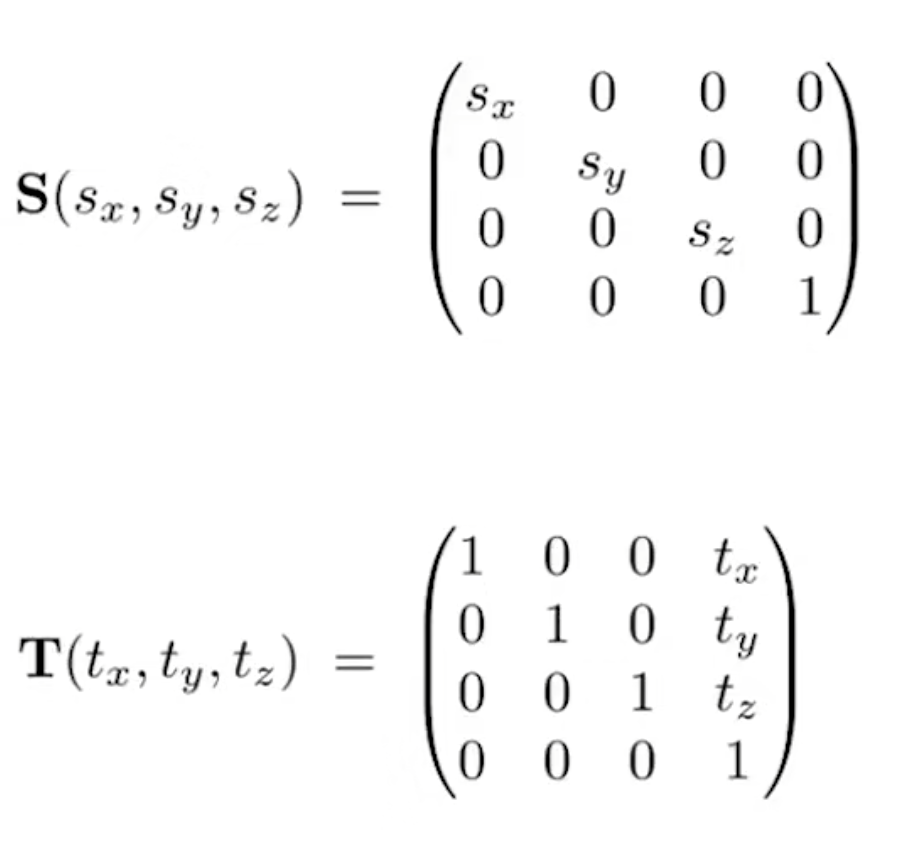
- 缩放
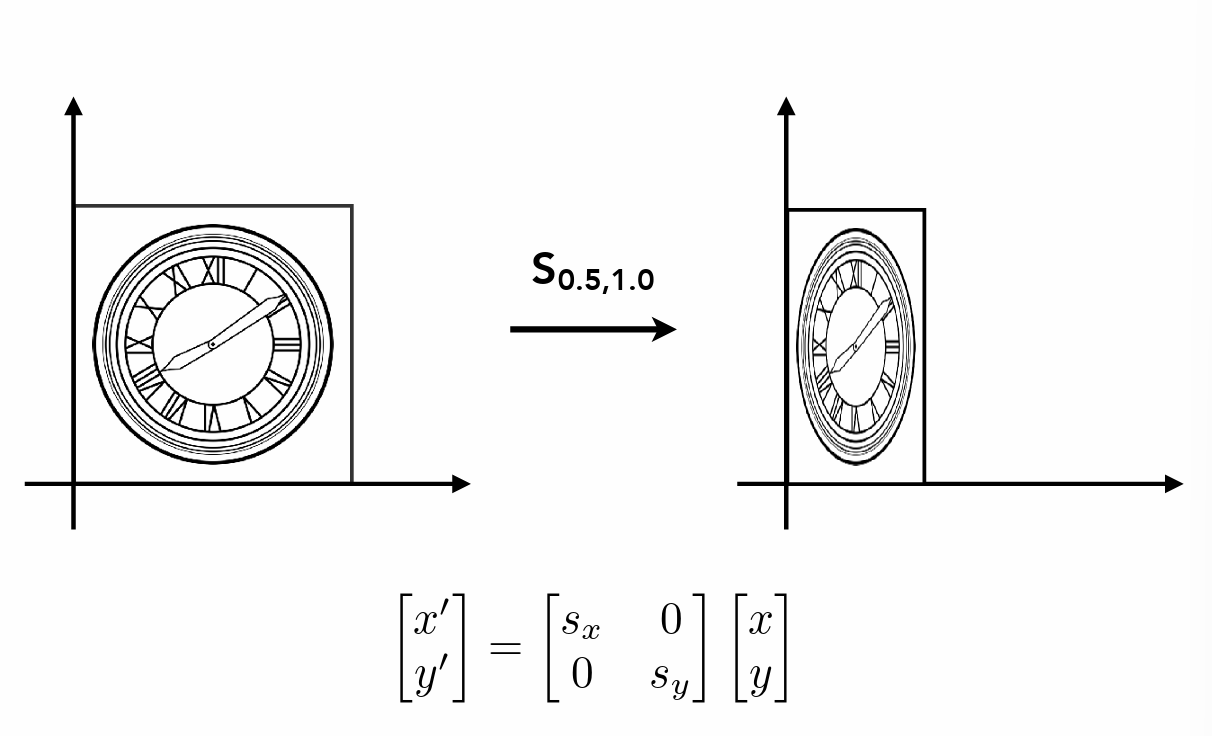
- s 为负数时也可以用于图像的翻转
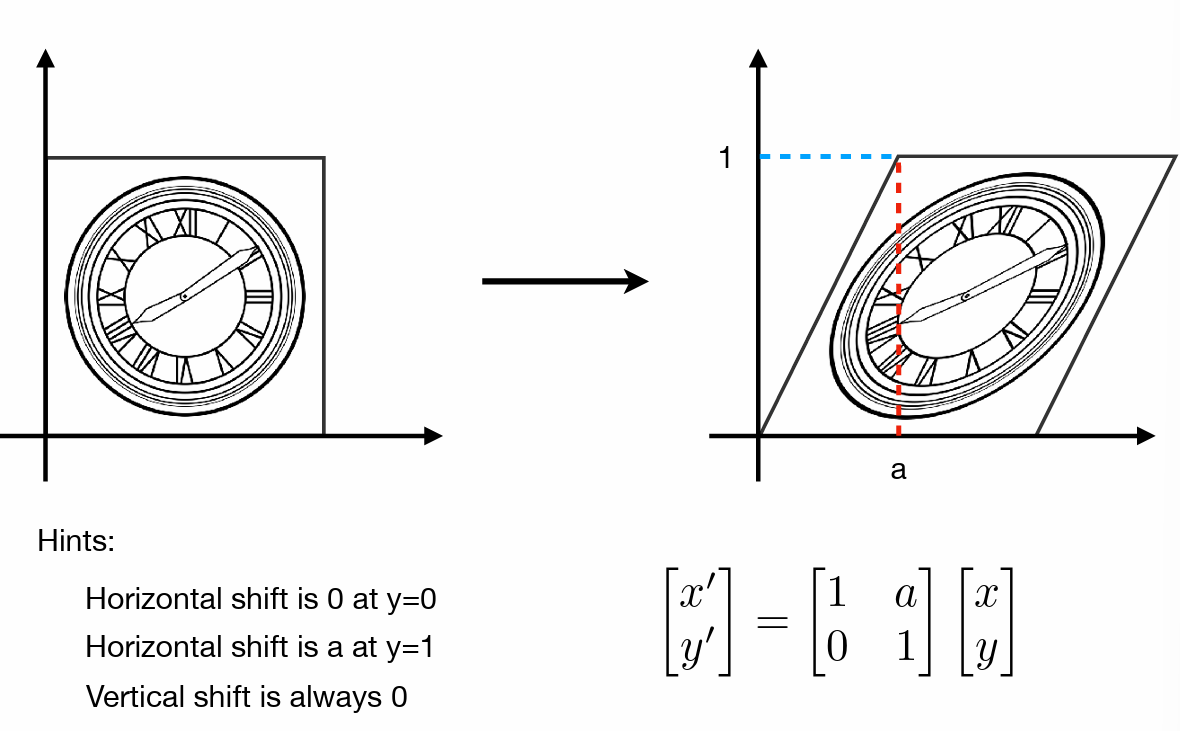
- 变形(切变)
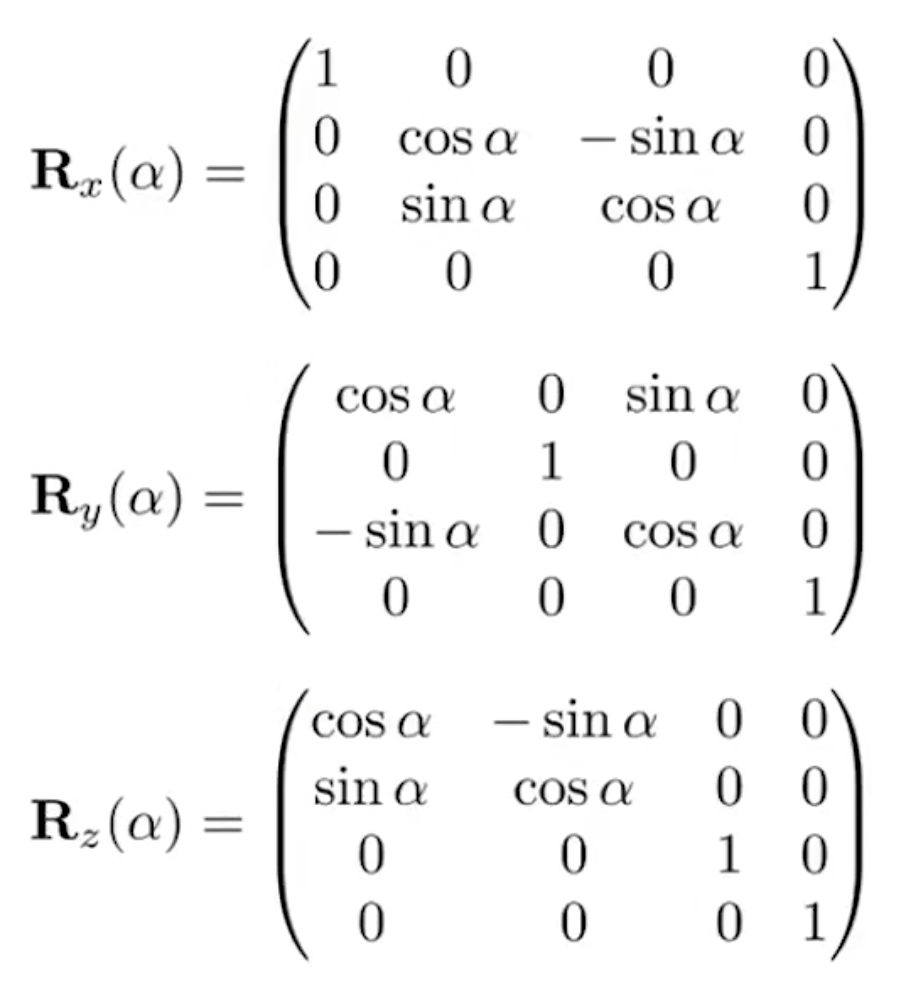
- 旋转(以原点为中心点)

- 旋转矩阵的转置等于逆(正交矩阵)
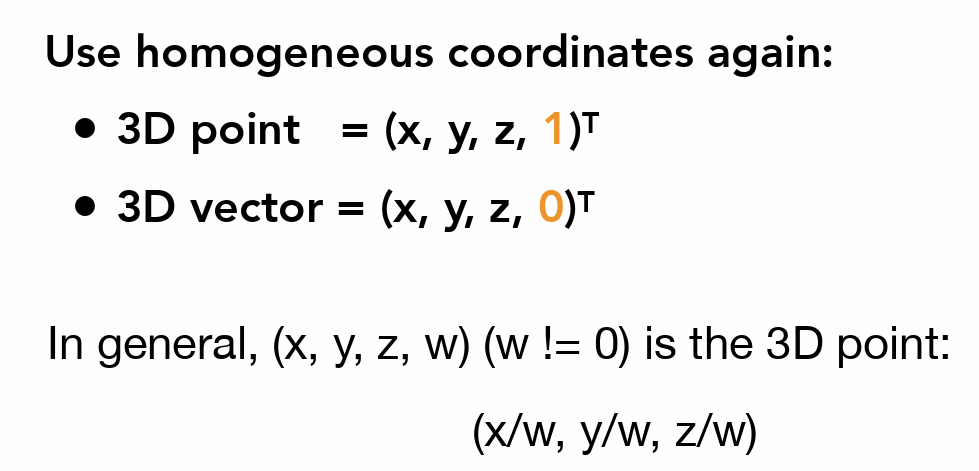
齐次坐标¶
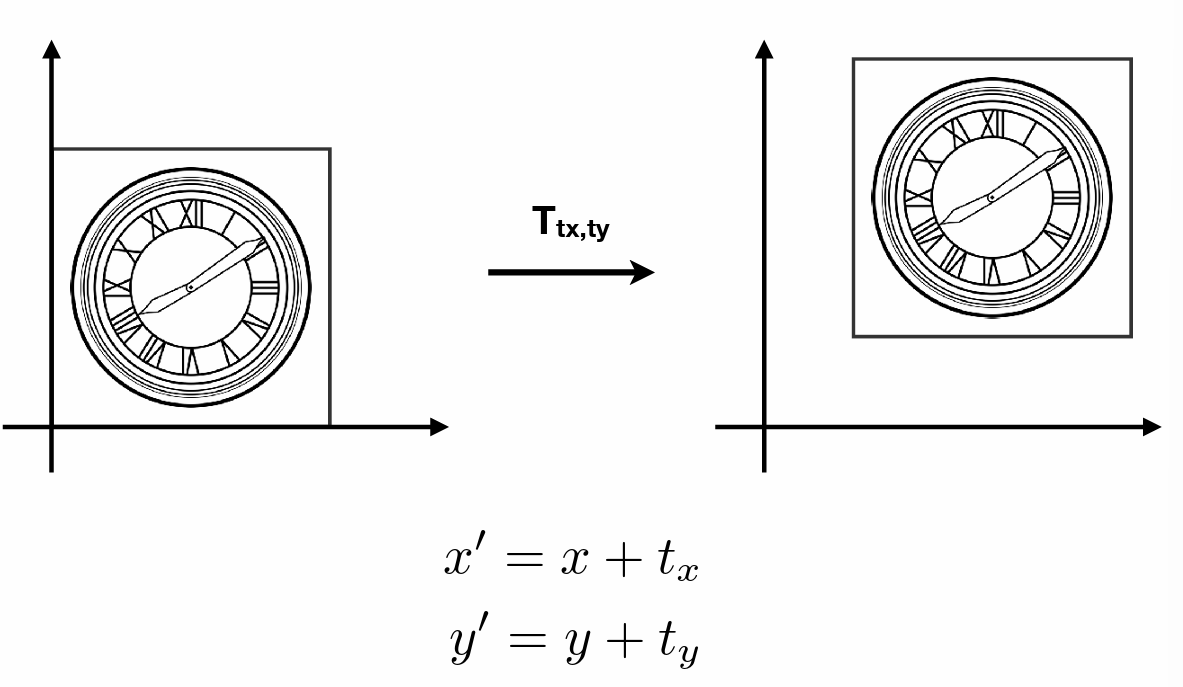
- 目的:用矩阵乘法(线性变化)无法表示平移
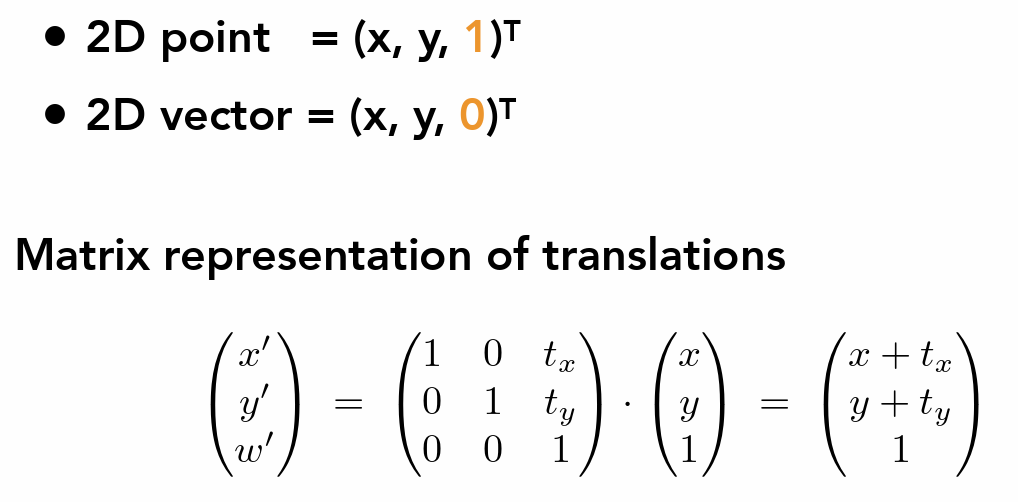
- 用三维向量表示二维坐标
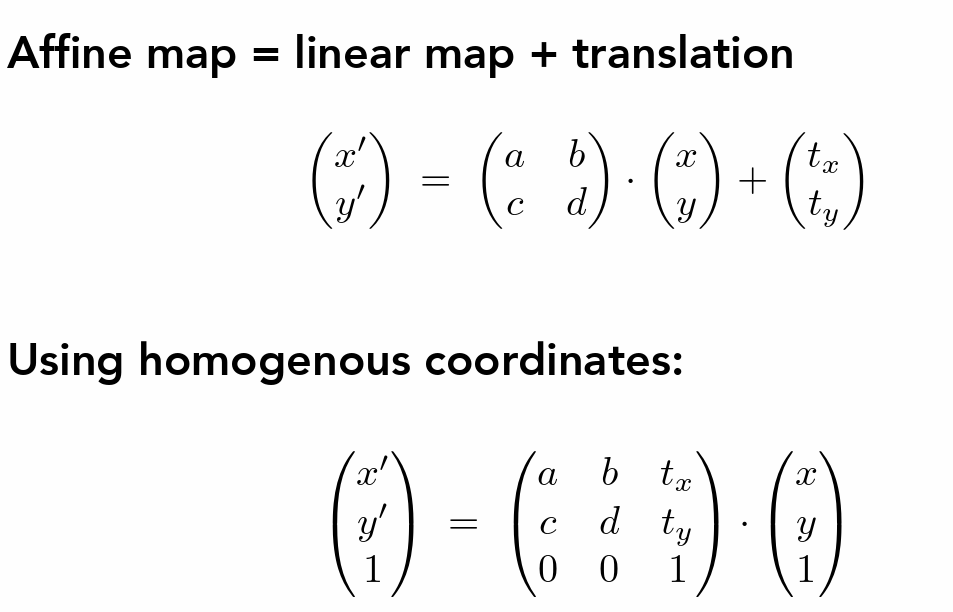
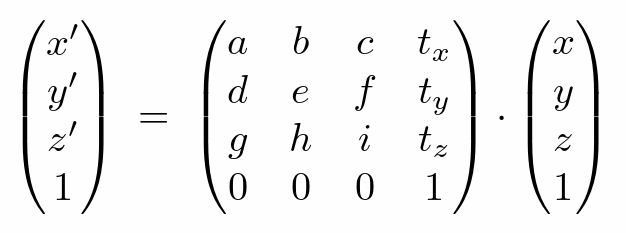
- 先线性变化再平移
- 通过第三维度是 1/0 来判断是点还是向量,向量的第三维为 0,因而向量不会因为平移而发生改变
-
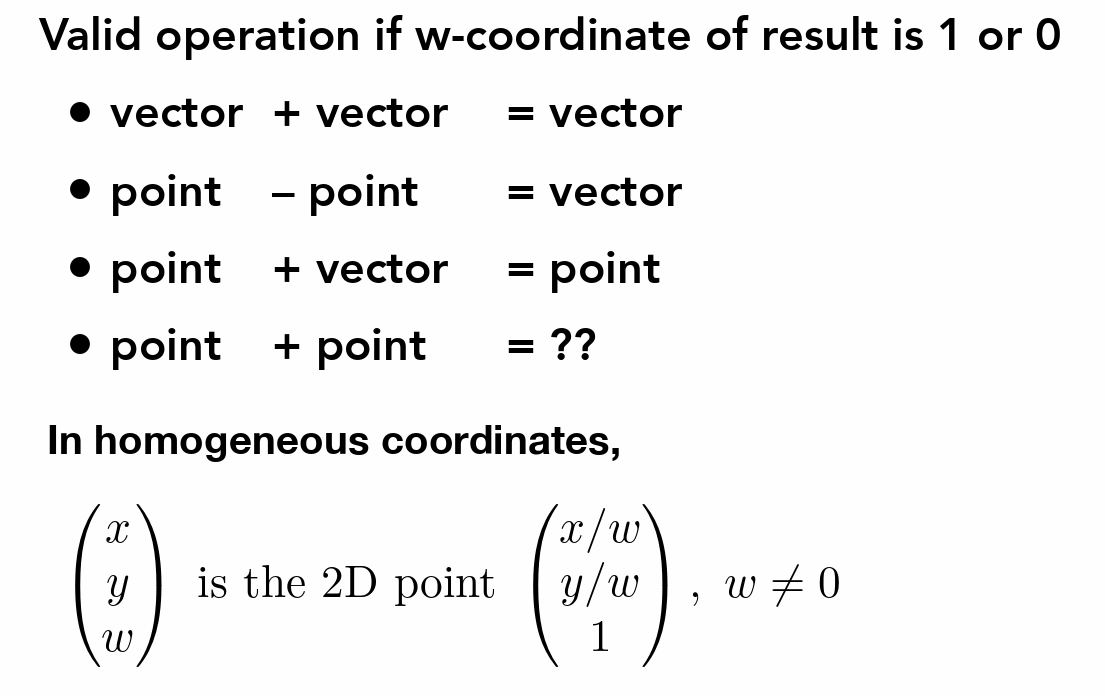
- 点加点表示两个点的中点(规格化,保证第三维为 1)
-
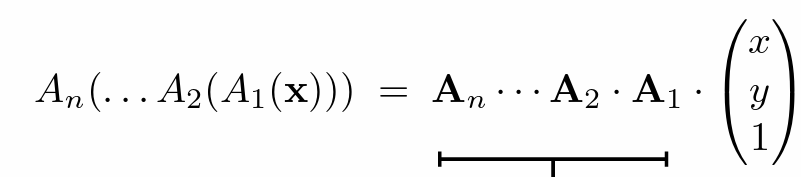
- 逆矩阵可以表示逆变换
- 连乘(注意先进行的在右侧)
- 组合变换通常先旋转后平移
-
-
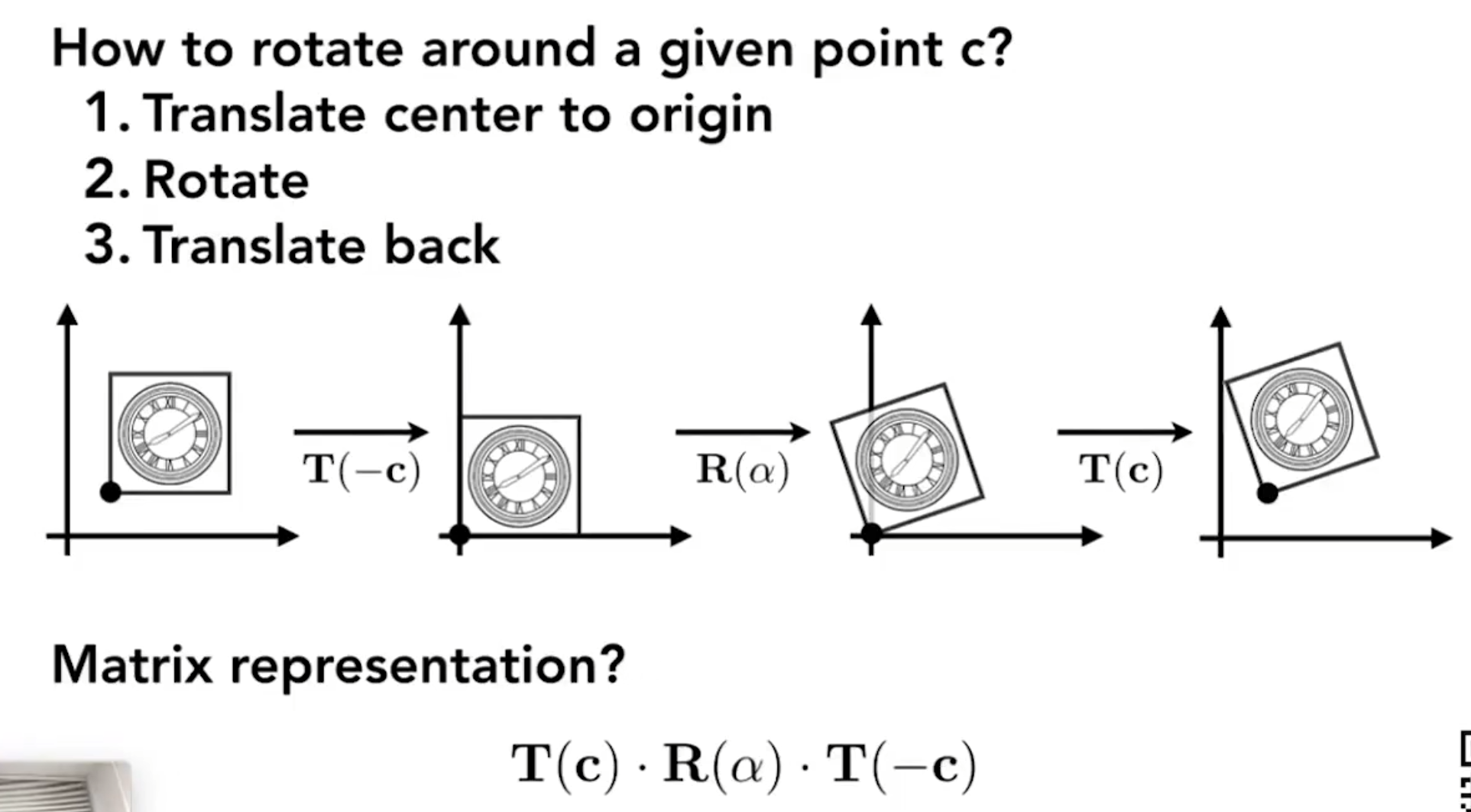
以任一点为原点旋转
三维变换¶
- 罗德里格旋转公式(绕任一过原点的向量 n 旋转)

- 以上矩阵变换的方式不适用于线性插值(并不是线性连续变化的),如果需要动画、插值需要使用四元数
视图变化¶
- mvp 矩阵变化
- 代表了模型(Model)、视图(View)、投影(Projection)三个变换矩阵的乘积
- 模型矩阵:将对象的局部坐标系(模型空间)转换到世界坐标系(世界空间)。这个变换涉及到物体的位移、旋转和缩放。
- 视图矩阵:将世界坐标系转换到观察者(或摄像机)的坐标系(视图空间)。这个变换通常涉及到将摄像机(视点)移动到原点,并进行必要的旋转,使得观察者面向场景的特定部分。
-
投影矩阵:将视图空间中的坐标转换到裁剪空间,进而通过透视除法转换为归一化设备坐标(NDC)。这个变换定义了一个可视范围,通常是一个锥形体(透视投影)或者一个长方体(正交投影)。
-
相机参数(视图矩阵)
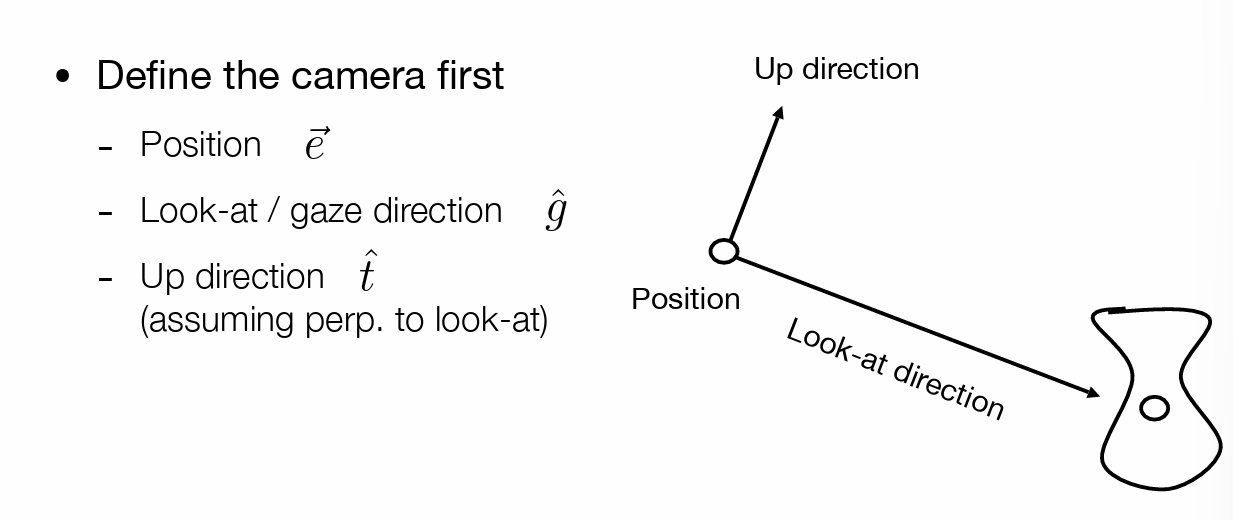
- position:原点位置
- look-at:相机指向
- up direction:相机头方向(即绕指向的旋转,就是相机上方的指向)
- 固定相机的位置,移动物体,标准位置:
- 回正过程(同时移动相机和物体,相对关系不变)
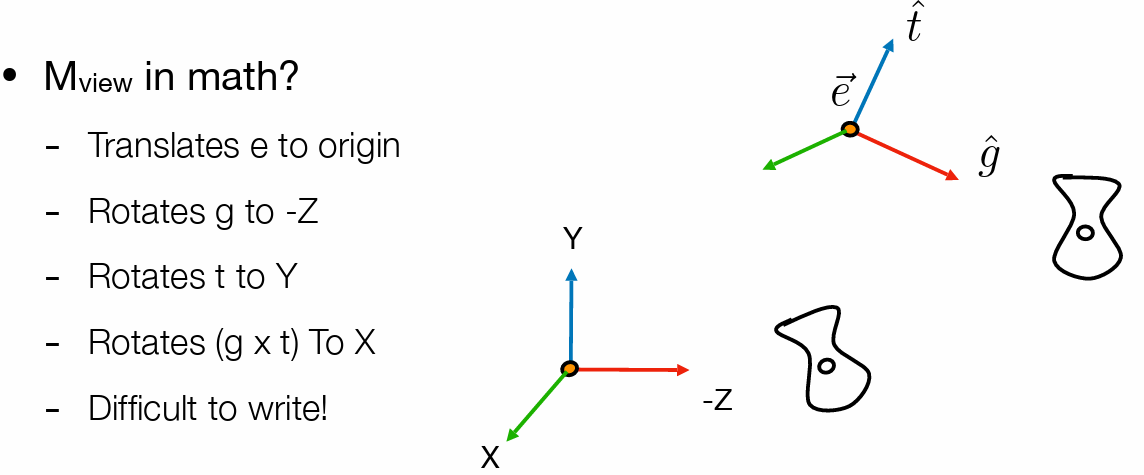
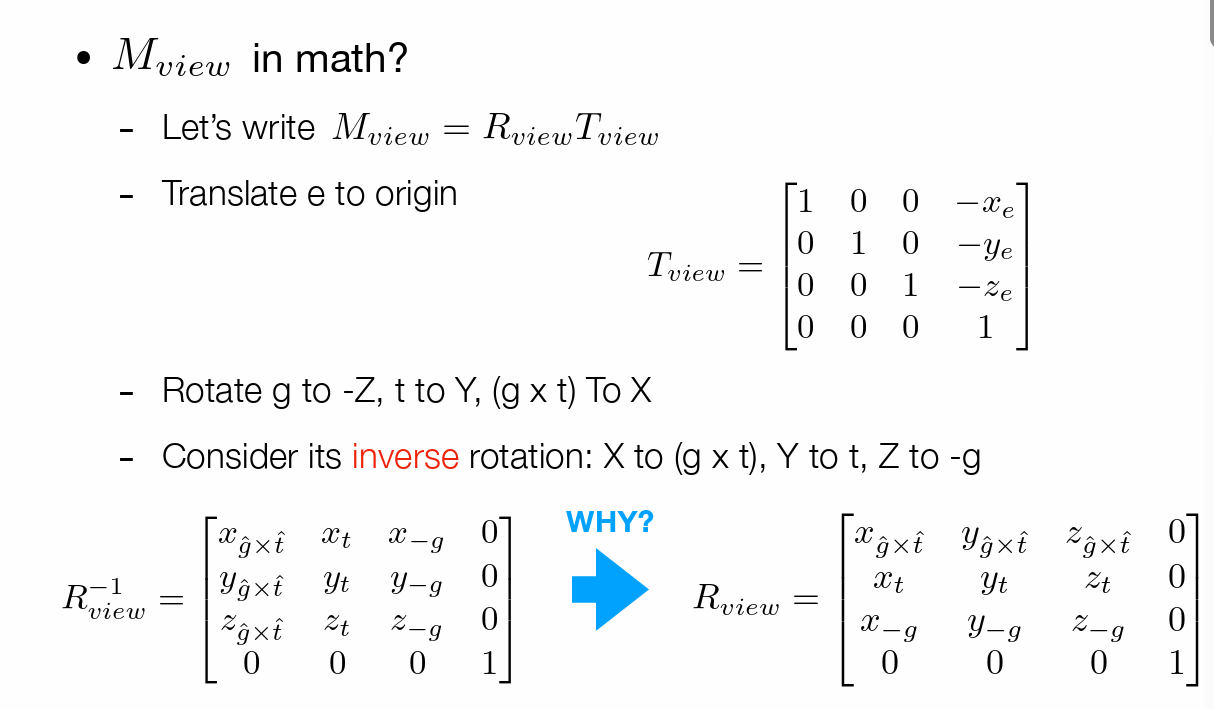
- 先平移再旋转(逆矩阵便于确定旋转方式)

投影变化¶
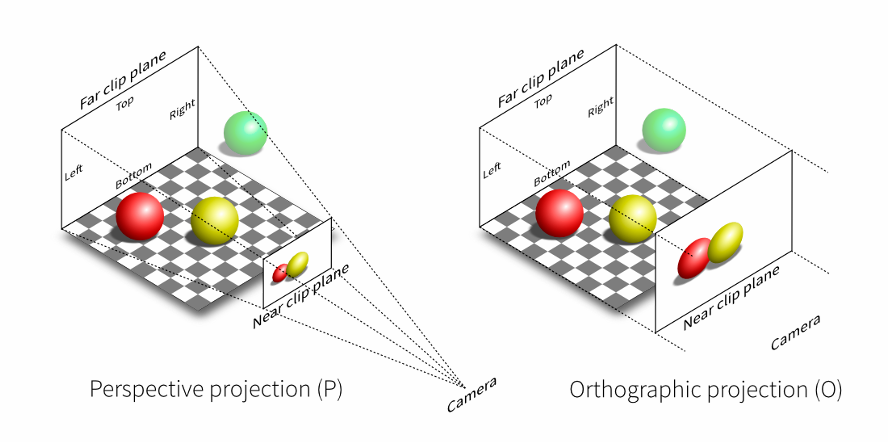
正交投影¶
- 平行线仍然平行
- 看作摄像机无限远,平行投射
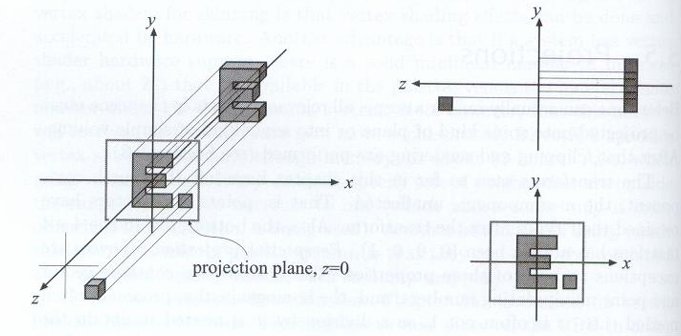
- 相当于扔掉 z 坐标
- 长方形投影到标准正方体(观测矩阵)
- 先平移到原点,再进行缩放
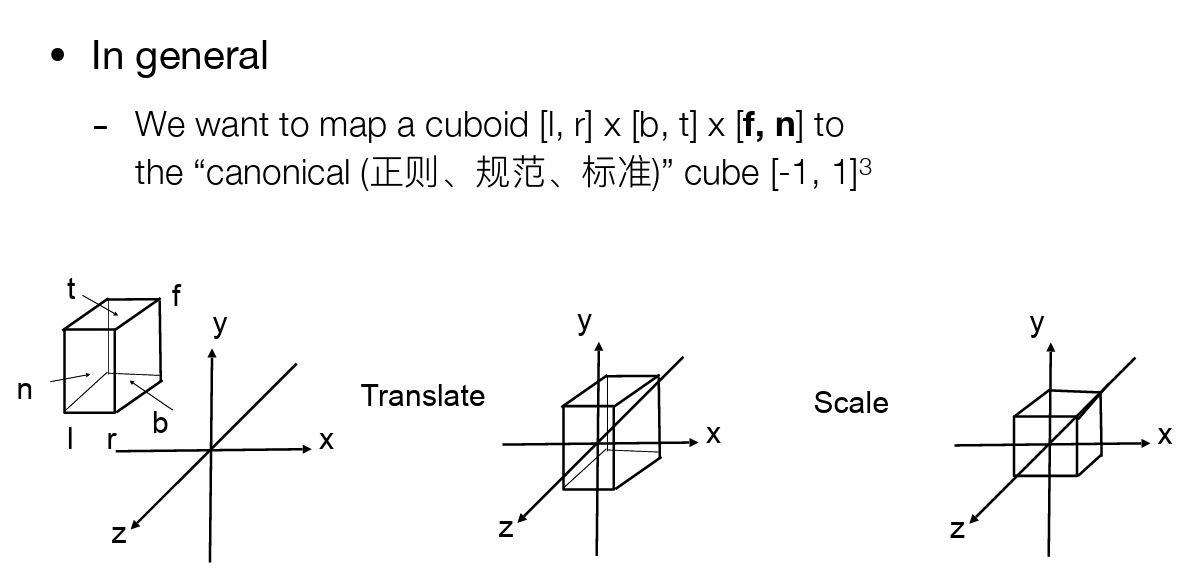
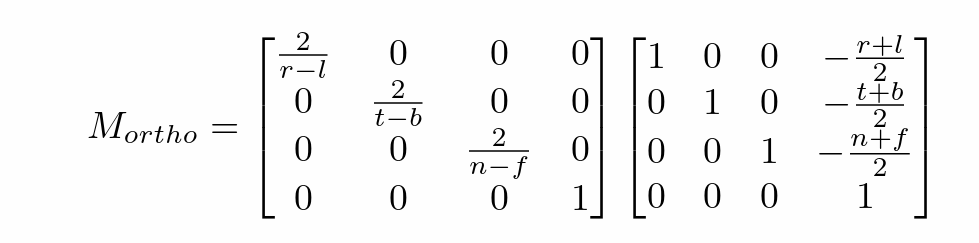
- 归一化到长度为 1(-1,1 的立方体),具体的长宽由 fov 和比率计算得到
- 通常由 fov 得到 y,再乘以比率得到 x;
透视投影¶
- 近大远小
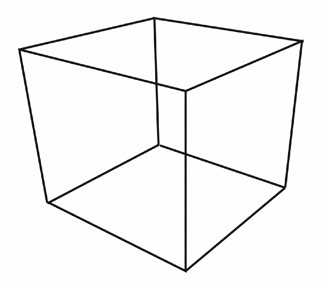
- 四棱锥投射
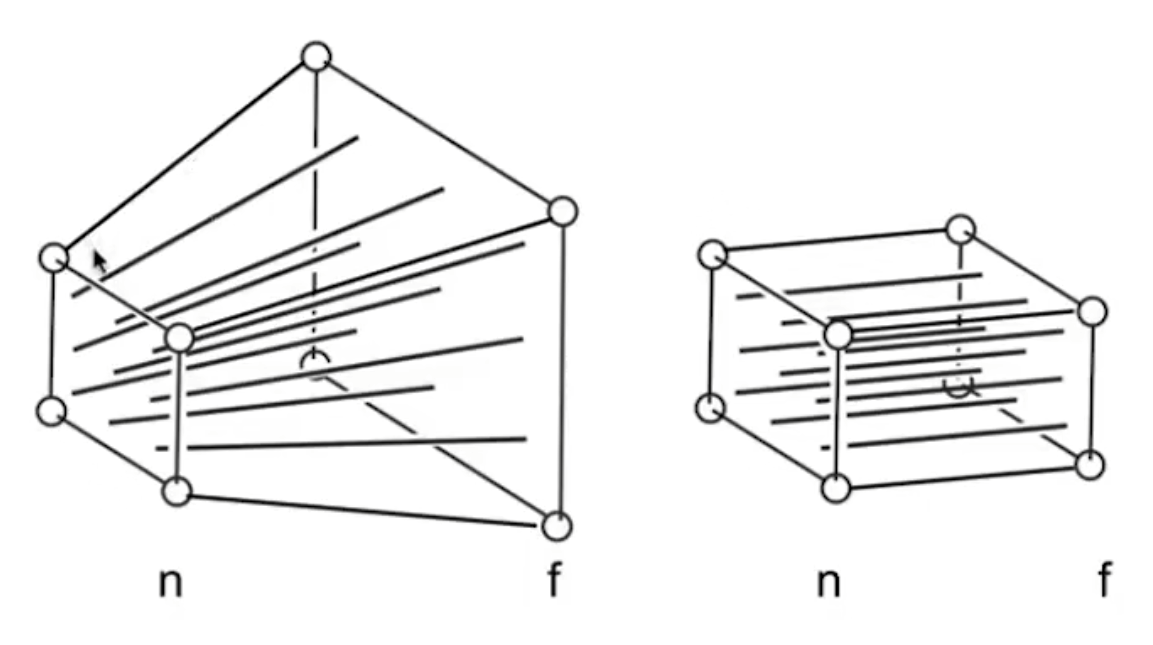
- 先将锥形“挤压”为长方体,再做正交投影
- 坐标变换
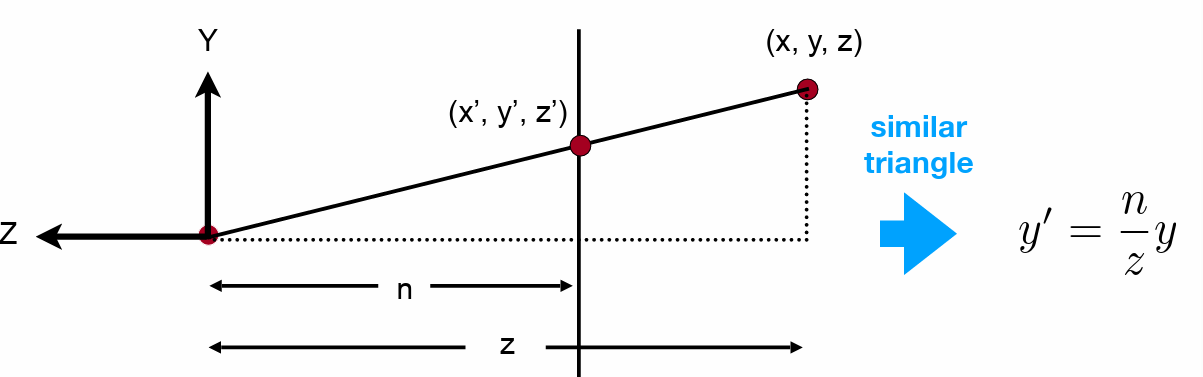
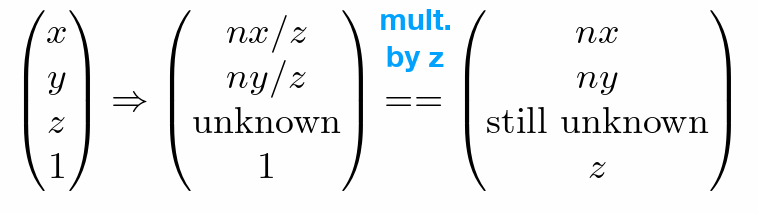
- 变换矩阵
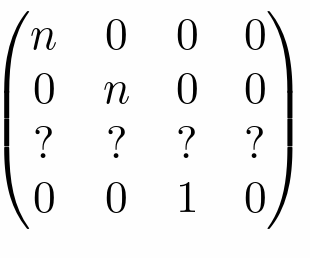
- 还无法确定 z 如何变化
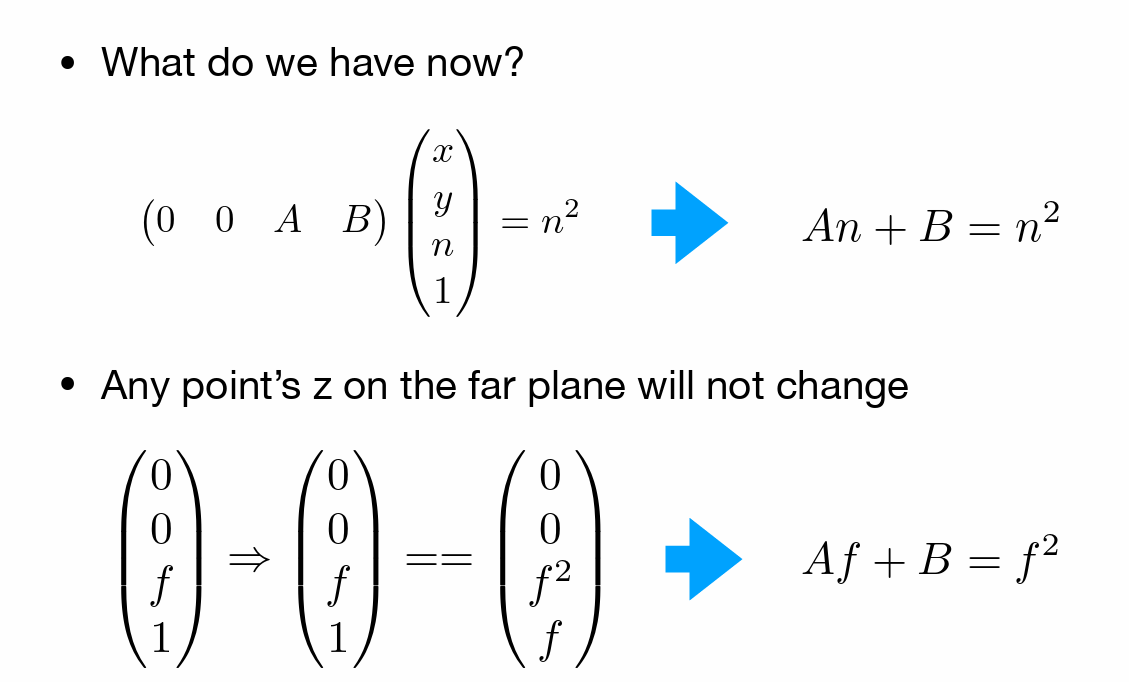
- 明确的是在近/远平面的 \(z\) 均不发生变化
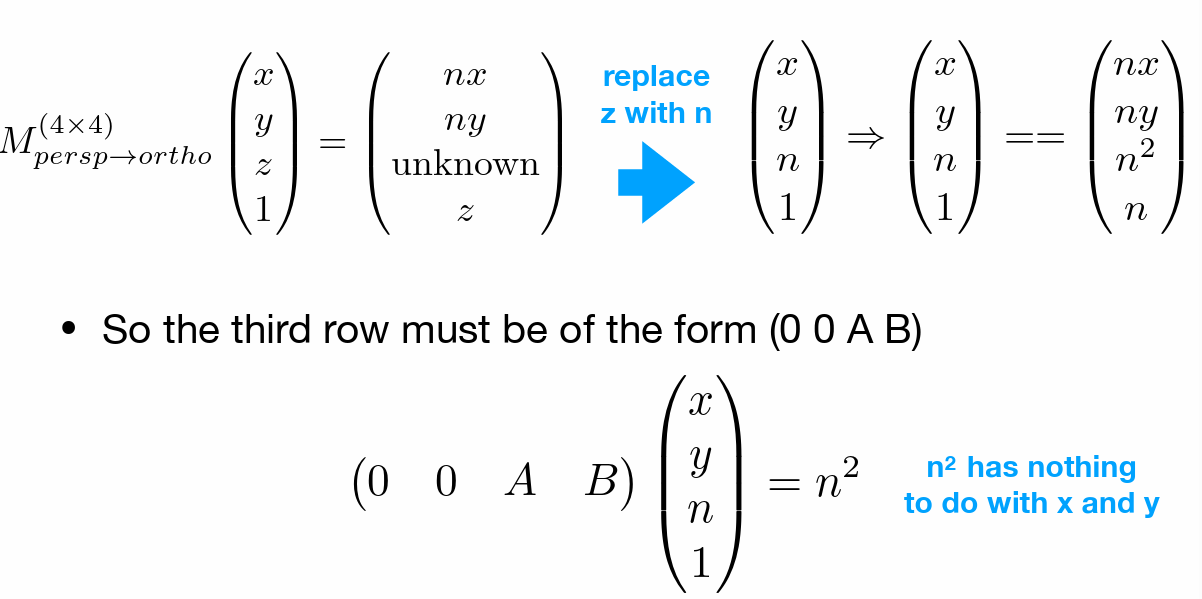
- 可知与 xy 无关,前两项为 0(利用近平面上变化前后的\(z\) 不发生变化来进行计算)
- 远平面的 xy 发生压缩,但是 z 不发生变化(中心点的 xyz 均不变)
- 即
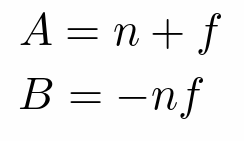
- 更确切的说 n=zNear; f=zFar 即最近/远可见距离

- 压缩+正交
Eigen::Matrix4f projection; Eigen:: Matrix4f persp_to_ortho; persp_to_ortho << zNear, 0, 0, 0, 0, zNear, 0, 0, 0, 0, zNear + zFar, -zNear * zFar, 0, 0, 1, 0; Eigen::Matrix4f ortho; float top = zNear * tan(eye_fov / 2 / 180 * MY_PI); float right = top * aspect_ratio; ortho << 1 / right, 0, 0, 0, 0, 1 / top, 0, 0, 0, 0, 2 / (zNear - zFar), 0, 0, 0, 0, 1; projection = ortho * persp_to_ortho;
透视除法¶
- 经过投影变化将点投射到了标准正方体,现在还需要将三维空间中的点映射到二维屏幕,得到归一化设备坐标(NDC)
- 如果有一个齐次坐标点 P (x, y, z, w),透视除法后的坐标为 (x/w, y/w, z/w)。这个新的点现在位于归一化设备坐标系内,其值通常限制在-1 到 1 之间。
- 透视除法是透视投影不可分割的一部分,它确保了远处的物体在屏幕上呈现得更小,近处的物体呈现得更大,从而创造了深度感。
透视矫正插值¶
- 通常直接在三角形顶点之间对像素属性(如 uv、颜色、法线等)直接做线性插值
- 但是在透视投影的 3D 场景下这种直接线性插值是错误的。
- 之前的透视投影算法中计算质心坐标时,用到的点已经是屏幕坐标系下的表示了,插值运算在这个时候不会考虑近大远小。首先绘制ABC,通过插值得到屏幕上AB的中点N,和屏幕上AC的中点P,同理在绘制ACD时得到M。此时,算法得到的中点是屏幕上线段AC的中点P,如图中紫色线所示。
- 产生问题的主要原因是:通过屏幕坐标来计算质心坐标
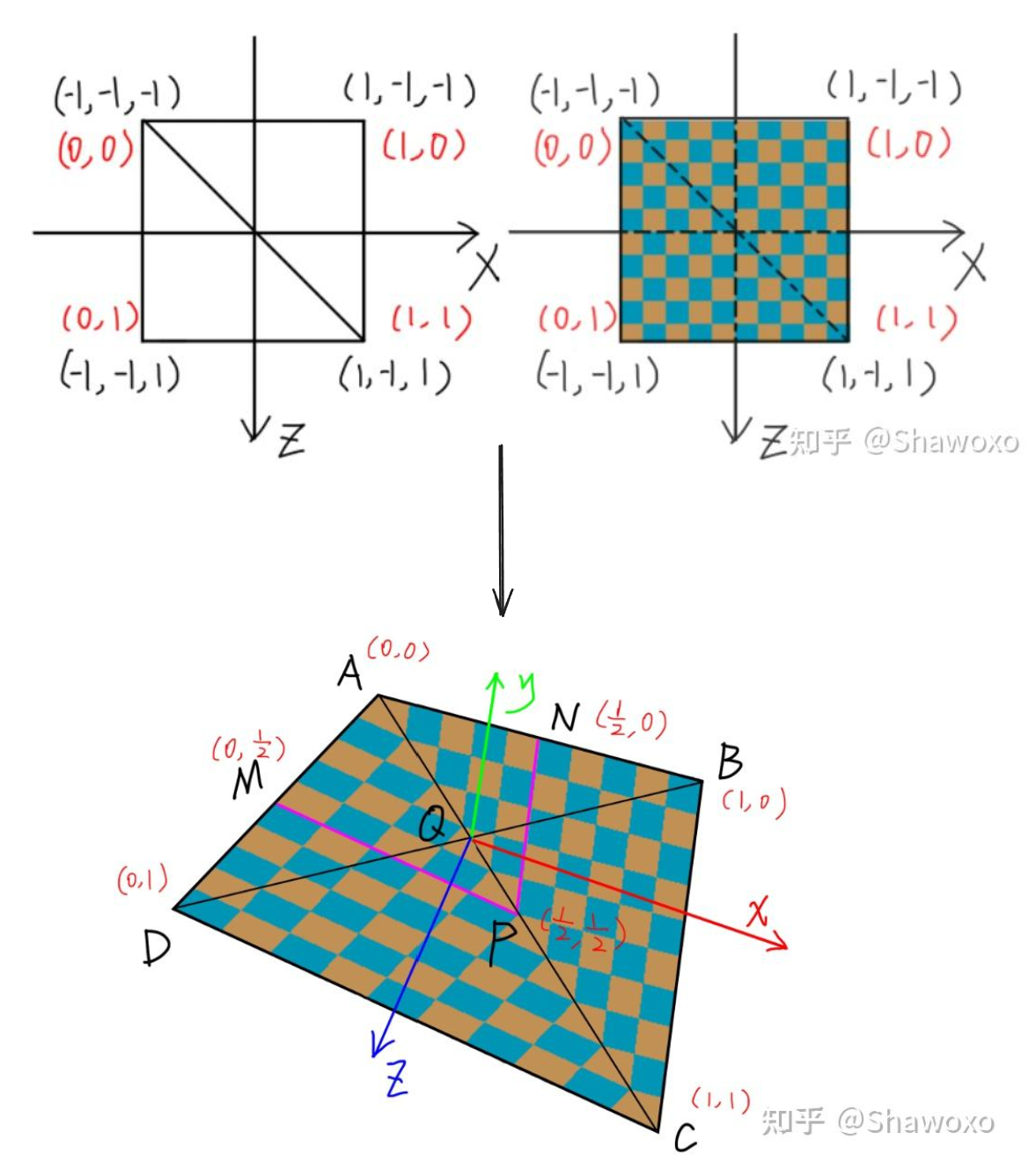
图中纹理的映射就出现了明显的错误,纹理的中心点 P 应该出现在对角线加点 Q 处
- 透视矫正插值就是为了对属性插值过程进行矫正,保证插值结果符合实际空间中透视投影的规律
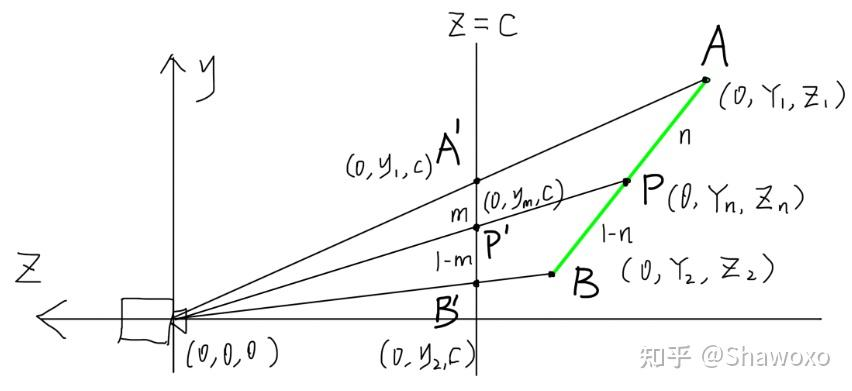
- 如图所示一个简单的 2 D 上的透视投影,上面 uv 计算出现问题就是因为使用 \(A'B'P'\) 直接计算比例对 UV 进行映射,而真正要使用的则是 \(ABP\)
- 要解决的问题:已知 \(P^{\prime}=(1-m)A^{\prime}+mB^{\prime}\) 要得到 \(P=(1-n)A+nB\)
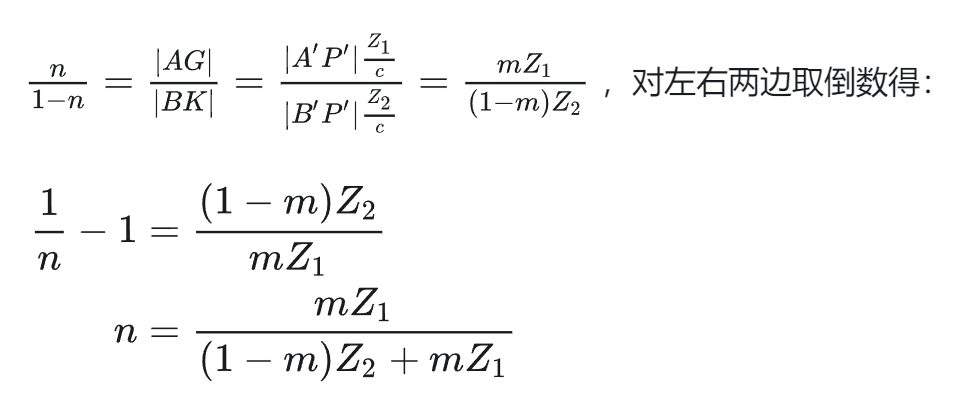
- 接下来吧 \(AB\) 替换为要插值的参数,就可以计算得到插值结果了
- 进一步扩展到三维 \(Z_n=\frac1{\frac{1-u-v}{Z_1}+\frac u{Z_2}+\frac v{Z_3}}\)